Adaptive Synchronization of Fractional-Order Complex-Valued Neural Networks with Discrete and Distributed Delays


1
College of Mathematics and Systems Science, Shandong University of Science and Technology, Qingdao 266590, China
2
College of Electrical Engineering and Automation, Shandong University of Science and Technology, Qingdao 266590, China
3
School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing 210023, China
*
Authors to whom correspondence should be addressed.
Entropy 2018, 20(2), 124; https://doi.org/10.3390/e20020124
Submission received: 25 January 2018
/
Revised: 10 February 2018
/
Accepted: 11 February 2018
/
Published: 13 February 2018
(This article belongs to the Special Issue Research Frontier in Chaos Theory and Complex Networks)
Abstract
:In this paper, the synchronization problem of fractional-order complex-valued neural networks with discrete and distributed delays is investigated. Based on the adaptive control and Lyapunov function theory, some sufficient conditions are derived to ensure the states of two fractional-order complex-valued neural networks with discrete and distributed delays achieve complete synchronization rapidly. Finally, numerical simulations are given to illustrate the effectiveness and feasibility of the theoretical results.
1. Introduction
The complex-valued neural networks (CVNNs) are the networks that deal with complex-valued information by using complex-valued parameters and variables [1]. They have more different and complicated properties than the real-valued neural networks (RVNNs). CVNNs possess new capabilities and higher performance, which makes it possible to solve some problems that cannot be solved by their real-valued counterparts [2,3]. Actually, most of the applications of neural networks (NNs) involve complex information [4,5]. Therefore, it is of great significance to study the dynamical properties of CVNNs [6,7,8,9,10,11,12,13,14]. In recent years, CVNNs have received considerable attention due to their widespread applications in signal processing, quantum waves, remote sensing, optoelectronics, filtering, electromagnetic, speech synthesis, and so on [15,16].
Nowadays, fractional calculus has become a hot topic and many applications have been found in the fields of physics and engineering [17,18,19,20]. Fractional calculus is the generalization of classic calculus, which deals with derivatives and integrals of arbitrary order. Many real world objects can be described by the fractional-order models, such as dielectric polarization, electromagnetic waves, entropy and information [21,22,23,24]. The main advantage of fractional-order models in comparison with their integer-order counterparts is that fractional derivatives provide an excellent instrument in the description of memory and hereditary properties of various materials and process [25,26]. In addition, fractional-order models are characterized by infinite memory [27,28,29]. Thus, fractional-order NNs (FNNs) are more effective in information processing than integer-order NNs [30]. In recent years, the dynamics of FNNs has been investigated by many researchers and some interesting results have been achieved [31,32,33,34,35]. In [31], fractional-order cellular NNs have been presented and hyperchaotic attractors have been displayed. In [32,33,34], chaos control and synchronization of FNNs were investigated by using the Laplace transformation or Lyapunov method. In [35], the dynamics, including stability and multistability, of FNNs with the ring or hub structure has been investigated.
As is well known, time delays may affect and even destroy the dynamics of NNs [36,37,38,39,40]. Due to the signals propagation through the links and the frequently delayed couplings in biological NNs, time delay unavoidably exists in NNs [41,42]. In particularly, since the presence of an amount of parallel pathways with a variety of node sizes and lengths, NNs usually have spatial extent. Thus, there will be a distribution of propagation delays. Therefore, the study of fractional-order complex-valued neural networks (FCVNNs) with time delays is of both theoretical and practical significance. At present, the investigations of FCVNNs with discrete time delay have achieved many remarkable results [43,44,45,46]. For example, authors in [43,44,45] discussed the problem of stability of FCVNNs with time delays. Finite-time stability of fractional-order complex-valued memristor-based NNs with time delays has been intensively investigated in [46]. However, the dynamics of FNNs with distributed delay is even more complicated. Very recently, study concerning FNNs with distributed delay has become an active research topic. Many researchers have devoted to the investigation of FNNs with distributed delay and some results have been derived [47]. In [47], two sufficient conditions, which guarantee the asymptotic stability of the Riemann-Liouville FNNs with discrete and distributed delays, have been derived in terms of LMI.
So far, the synchronization of the integer-order CVNNs with time delays has been intensively studied by applying various control schemes [48,49,50,51]. However, using integer-order CVNNs with time delays to model real systems with memory and hereditary properties are inadequate in contrast with FCVNNs with discrete time delay [52]. To the best of our knowledge, few investigations have been devoted to the control and information synchronization of FCVNNs with time delays in spite of its practical significance. In [36,53], the problem of synchronization of FCVNNs with discrete time delays is analyzed and sufficient conditions are provided. On the other hand, adaptive control, as an efficient control method, has been designed and successfully applied to fractional order neural networks [34,54]. Motivated by the above discussions, this paper is devoted to investigating the problem of information synchronization of FCVNNs with discrete and distributed delays. An adaptive controller is designed to synchronize two FCVNNs with discrete and distributed delays. Based on adaptive control and Lyapunov stability theory, some sufficient conditions are derived to ensure that two FCVNNs with discrete and distributed delays can achieve information synchronization rapidly.
This paper is organized as follows. In Section 2, some definitions in the fractional-order calculus and some lemmas, which will be used later, are introduced. The adaptive controller is designed in Section 3. In Section 4, a numerical example is given to illustrate the effectiveness of the main results. Finally, conclusions are drawn in Section 5.
2. Preliminaries
There are several different definitions for fractional derivatives. Three of the most frequently used definitions are the Riemann-Liouville definition, the Grünwald-Letnikov definition and the Caputo definition. Since the initial conditions for fractional differential equations with Caputo derivatives take on the same form as for integer-order differential equations, we choose the Caputo definition in this paper.
Definition 1 ([17]).
The fractional integral of order α for a function f is defined as
where and , is the Gamma function defined as .
Definition 2 ([17]).
The Caputo fractional derivative of order α for a function f is defined as follows:
where n is the positive integer such that .
Lemma 1 ([55]).
Let be a continuous and differentiable function, then for any time instant ,
Lemma 2 ([56]).
If denotes a continuously differentiable function, for any , the following inequality holds almost everywhere:
Consider a simplified CVNN with discrete and distributed delays as the drive system, which is described by
where denotes the fractional order, is the state of the ith neuron at time t, , are complex constants, is the discrete time delay, are the external inputs, and denote the complex-valued activation functions, and denotes non-negative bounded delay kernel defined on which reflects the influence of the past states on the current dynamics.
In general, the kernel is taken as the following form:
where reflects the mean delay of the kernel.
For convenience, a new variable is introduced and defined as:
Then, one can rewrite the drive system as
where , , .
Similarly, the response system is defined as follows:
where are the control inputs to be designed later, , , .
To obtain the main results, one makes the following assumption.
Assumption 1.
Let , , , . and can be expressed by separating into its real and imaginary parts as
Assumption 2.
The partial derivatives of , , and with respect to u, v, exist and are continuous and bounded. In addition, , , and satisfy
where
3. Main Results
In this section, some sufficient conditions for the information synchronization of FCVNNs with discrete and distributed delays are derived.
Let . Subtracting the drive system (8) from the response system (9), one obtains the error system as follows:
Design the following control input
where , , , and are adjustable parameters, , , , and are arbitrary positive constants. When and , the drive system (6) and the response system (7) achieve the information synchronization, which can be ensured by the following theorem.
Theorem 1.
Proof.
Suppose that and are any solution of systems (6) and (7) with different initial values. Let
where , , , , , , , , and are constants to be determined later.
Now, construct a Lyapunov-like function as follows:
Based on Lemma 1, Lemma 2, one has
See the Appendix for the proof of , where is a positive constant.
From Definition 1 and (A1), one has
Therefore , . Then from (12), one knows that , , , , , and are bounded on . Thus, one can obtain there exists a positive constant satisfying
We declare that .
4. Numerical Simulations
In this section, some numerical simulations will be provided to demonstrate the main results.
Consider the drive FCVNN (6) with , , , , , , , , , , , and
where . The response FCVNN (7) share the same parameters with (6).
It is easy to compute , , , , , . The initial conditions are taken as
And let , , , , , , , , , , , , , , , , , , , , , , , , , , , , , . By calculation, one obtains
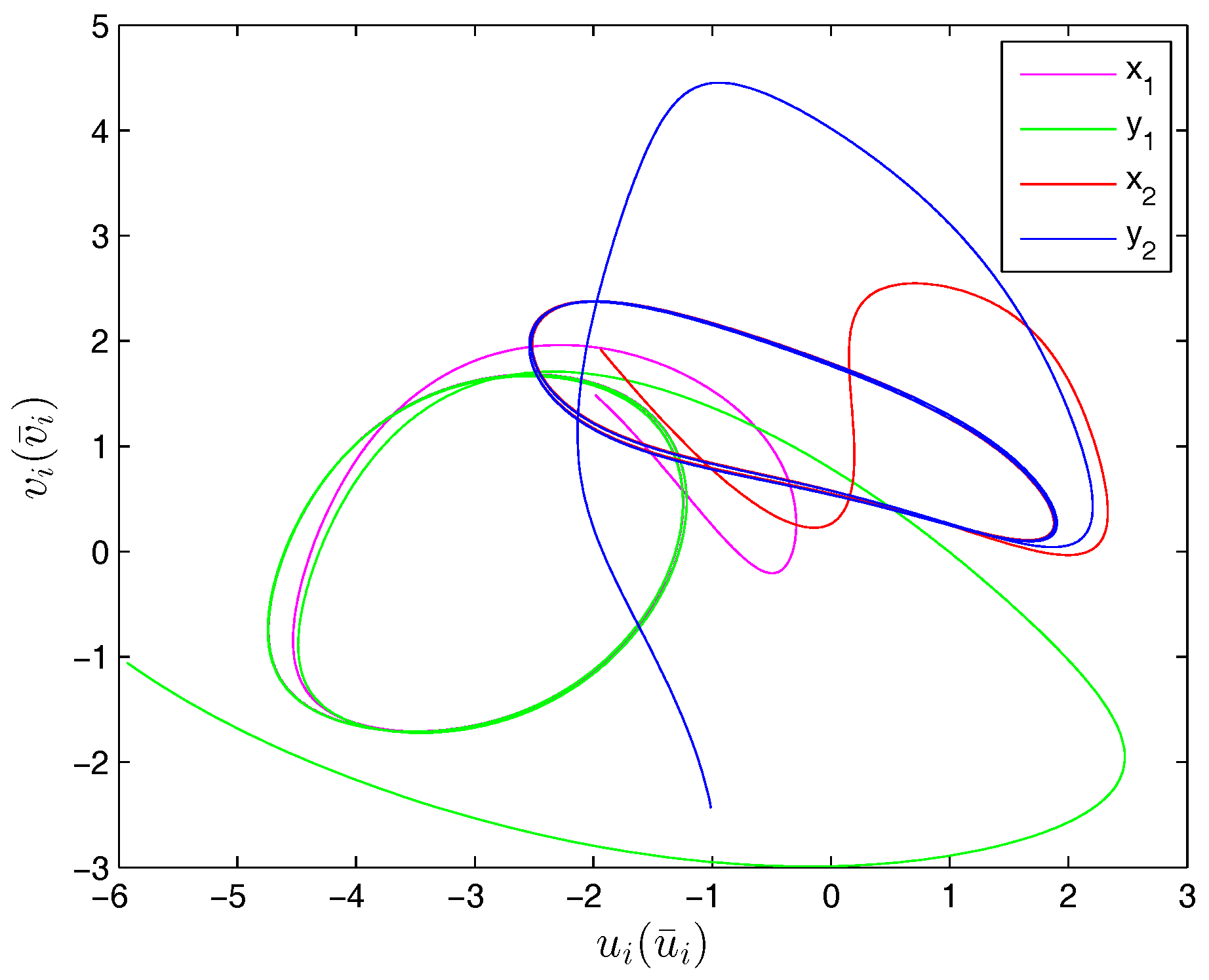
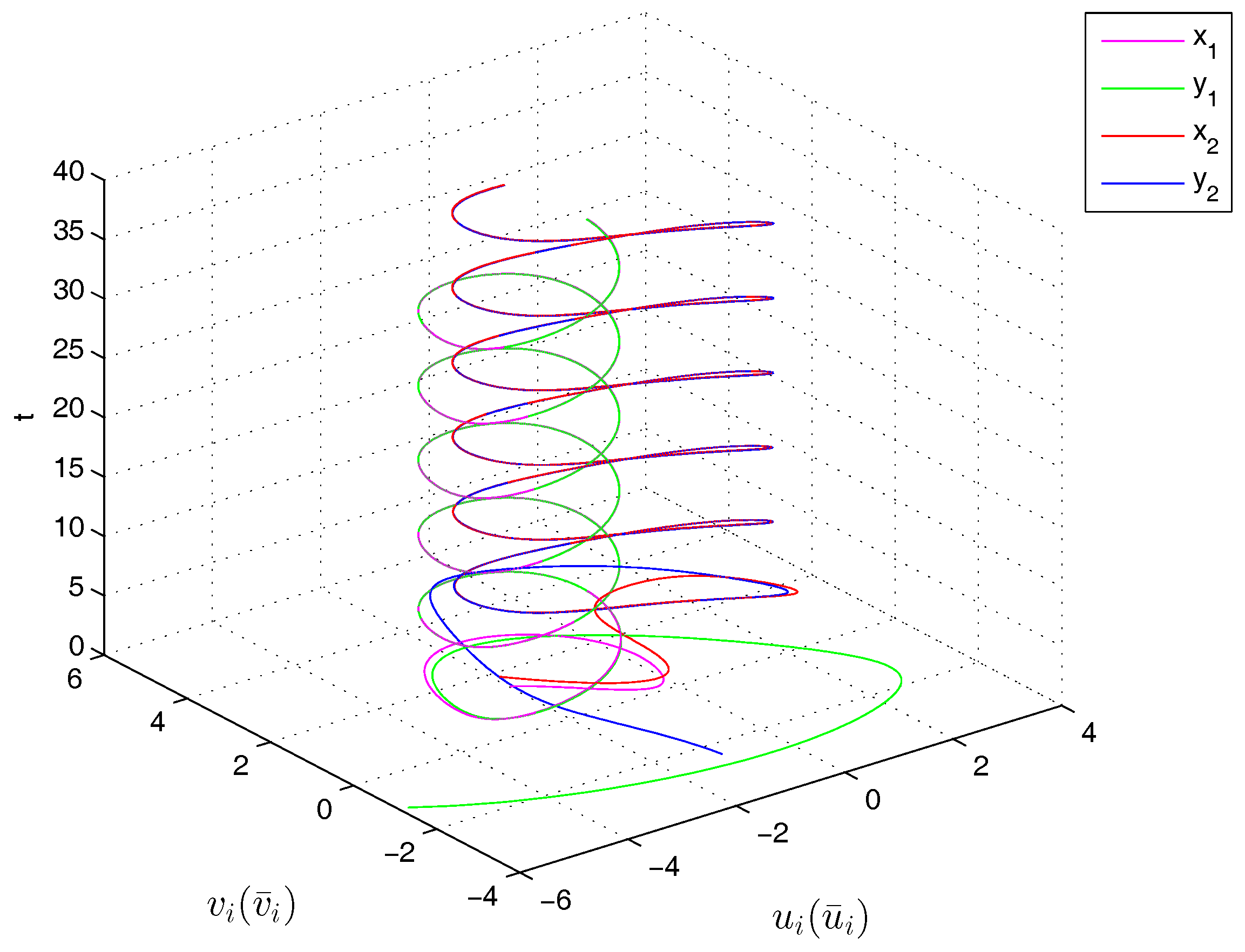
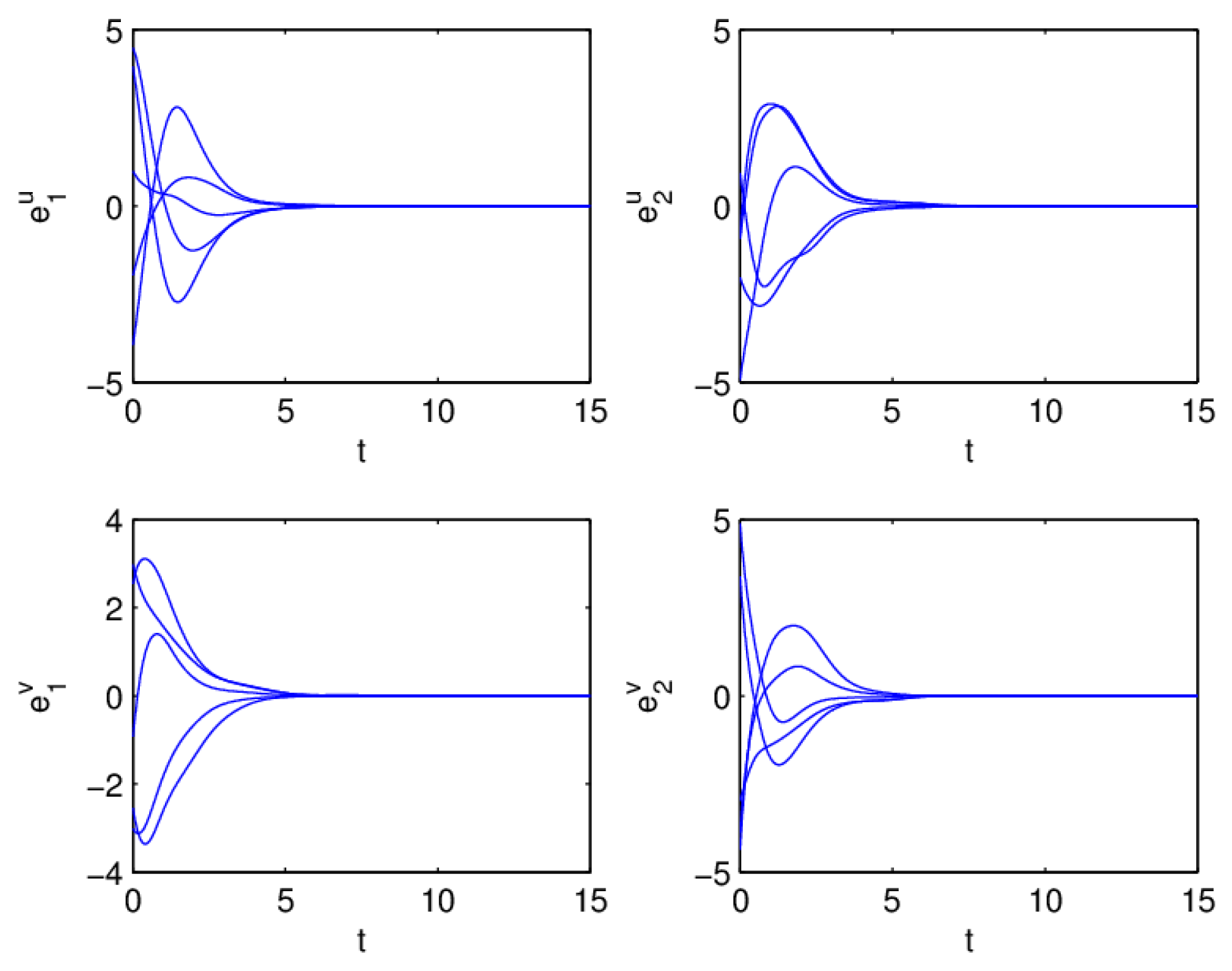
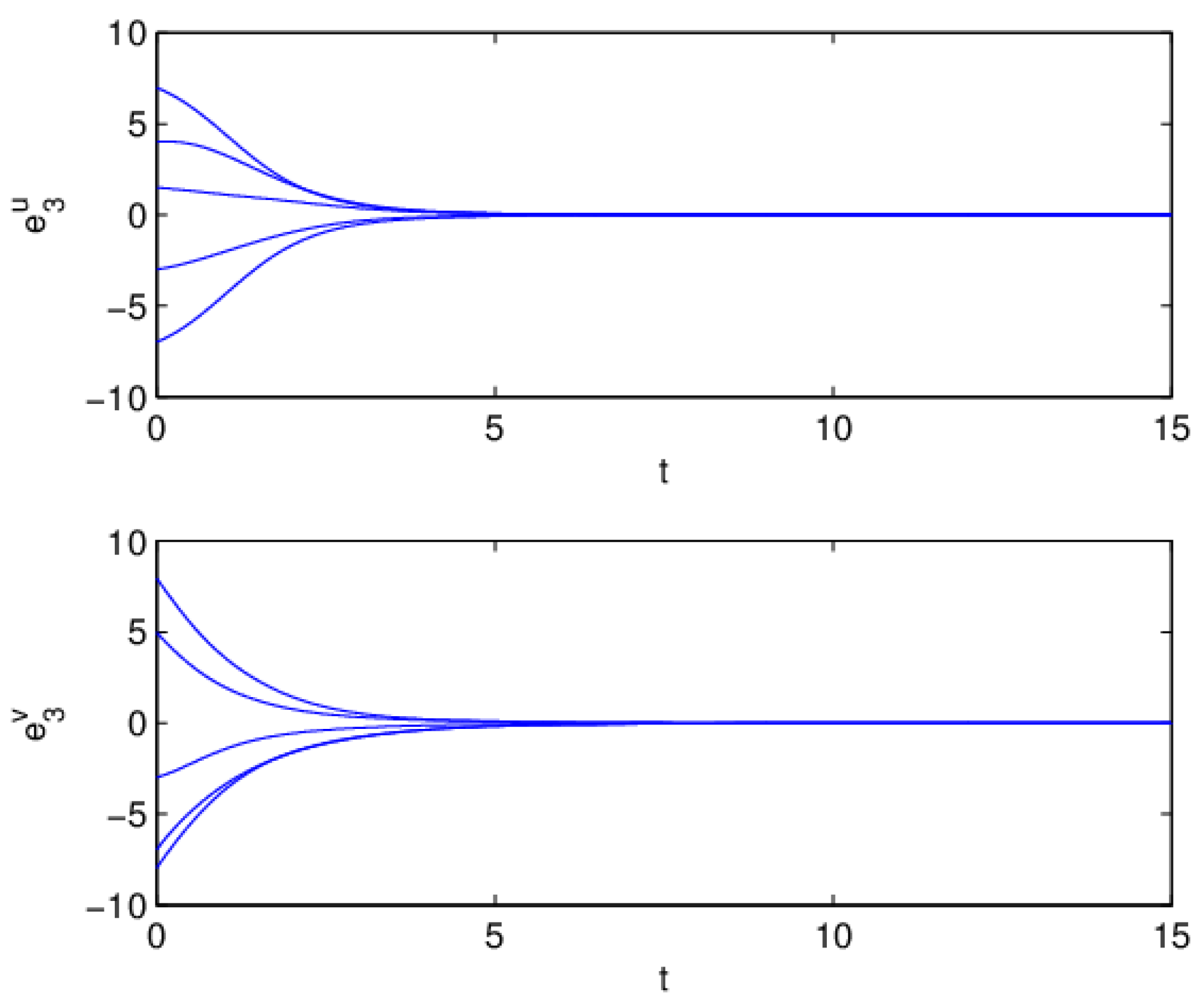
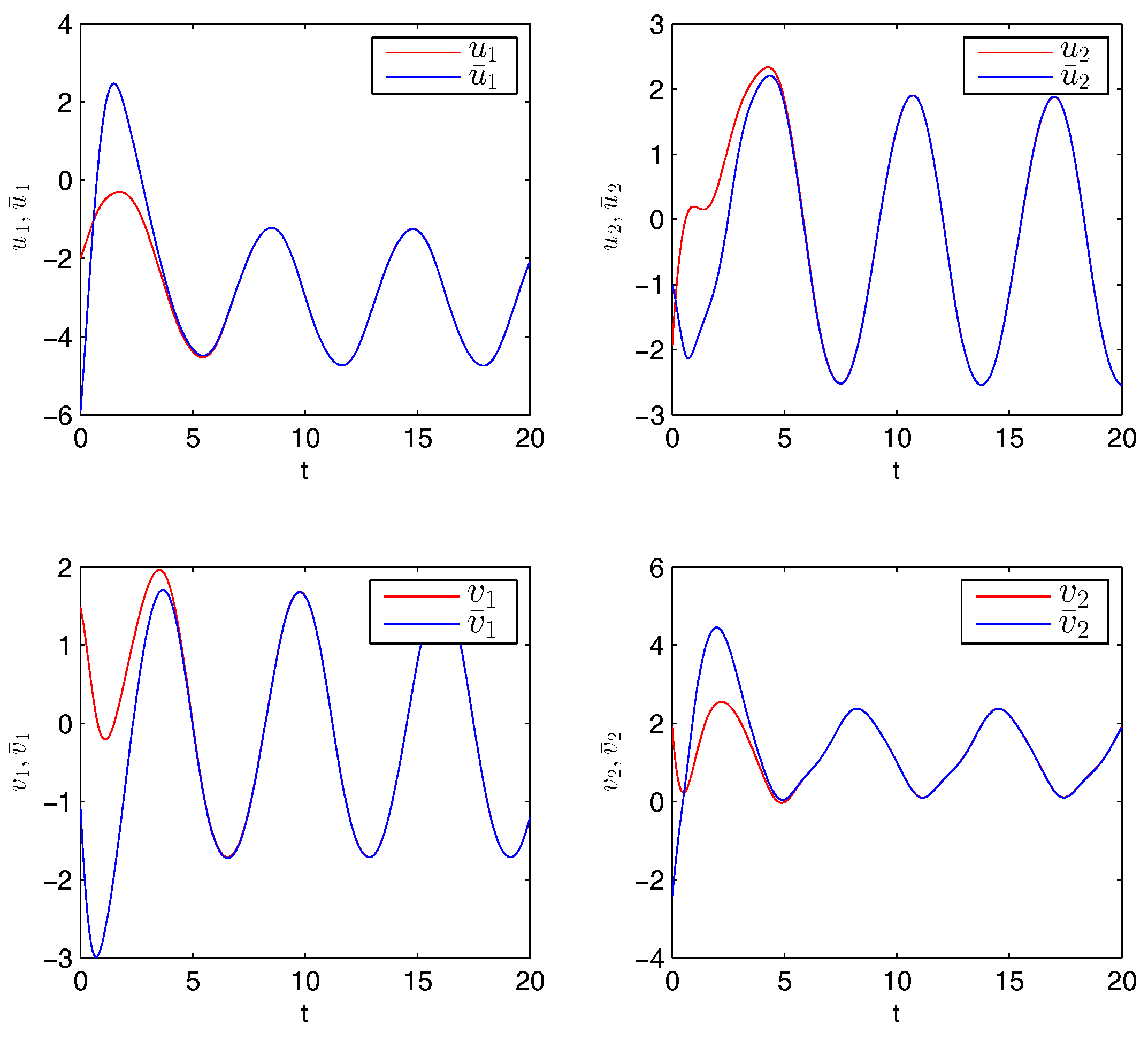
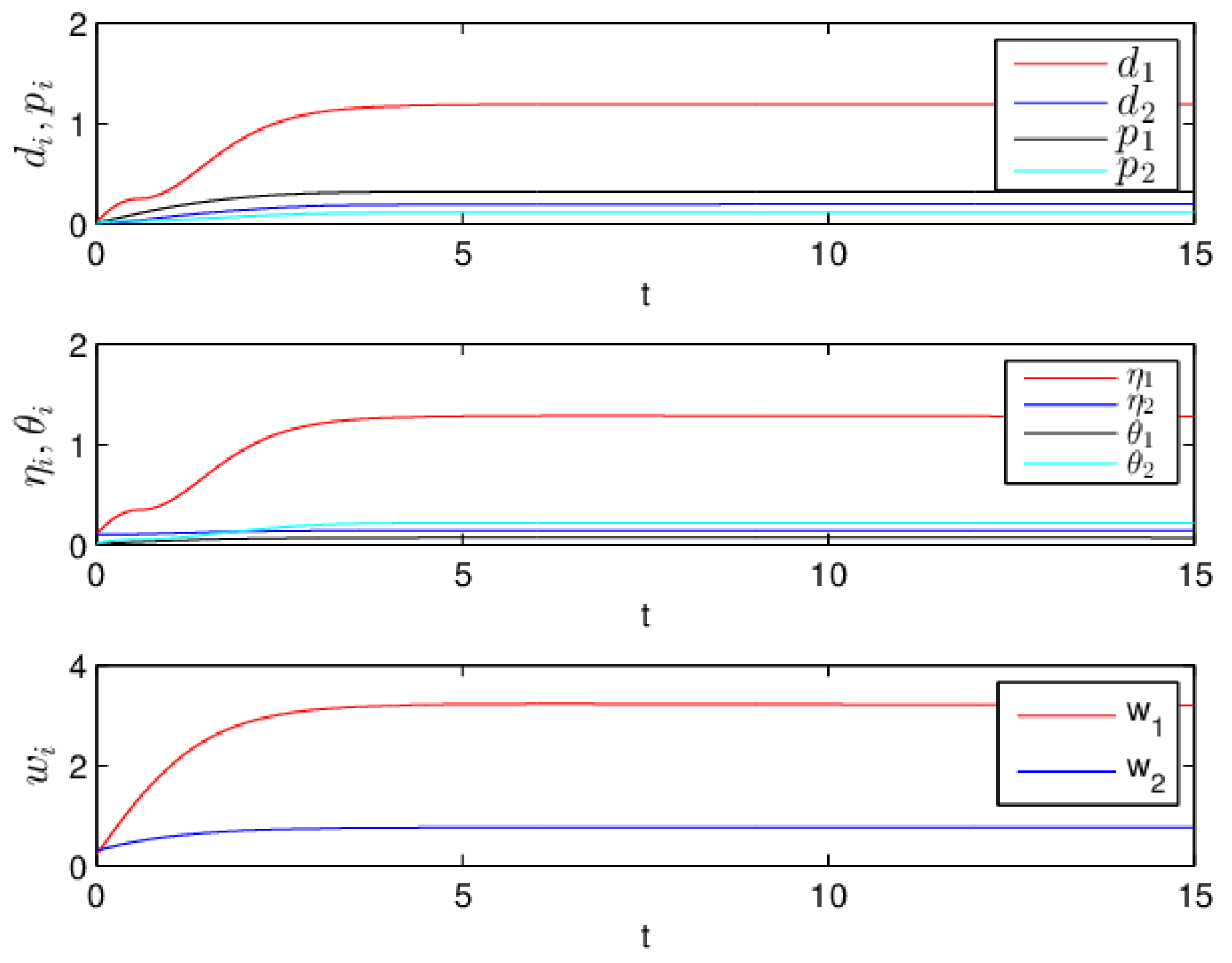
Therefore, from Theorem 1, the drive system (6) and the response system (7) with the initial values (14) can achieve globally asymptotically synchronization under the controller (11). The curves of states , , and in 2-dimensional plane and 3-dimensional space when achieving synchronization are depicted in Figure 1 and Figure 2, respectively. Figure 3 shows the errors between and with five different initial values. The errors of the introduced variables are plotted in Figure 4. Figure 5 shows the time revolution of real and imaginary parts of , , and with the controller (11), respectively. From simulation results in Figure 1, Figure 2, Figure 3, Figure 4 and Figure 5, it is clearly seen that the drive system (6) and the response system (7) can achieve synchronization. Figure 6 shows time response of the adaptive feedback gains , , , and .
5. Conclusions
In this paper, based on adaptive control and fractional-order Lyapunov-like function method, the information synchronization of drive-response FCVNNs with discrete and distributed delays has been studied. Due to the consideration of distributed delay, a new variable is defined to convert the FCVNN into a system with only discrete time delay. When systems (6) and (7) achieve information synchronization, the errors of the introduced variables tend to zero. The adaptive controller is designed in a elaborate way. Some sufficient conditions are developed to achieve the information synchronization. Numerical results show the effectiveness and correctness of the theoretical result.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Nos. 61573008, 61473178, 61473177), Post-Doctoral Applied Research Projects of Qingdao (No. 2016115) and SDUST Research Fund (No. 2014TDJH102).
Author Contributions
Li Li conceived and designed the adaptive synchronization controller. Zhen Wang was in charge of the fractional calculus theory and the simulation. Junwei Lu and Yuxia Li provided guidance and recommendations for research; and, lastly, Li Li contributed to the contents and writing of the manuscript. All authors have read and approved the final manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
From Assumptions 1 and 2, one has
One can subtly choose , , , and such that
Let
Then, one can obtain
where .
References
- Rakkiyappan, R.; Velmurugan, G.; Cao, J.D. Multiple μ-stability analysis of complex-valued neural networks with unbounded time-varying delays. Neurocomputing 2015, 149, 594–607. [Google Scholar] [CrossRef]
- Tu, Z.W.; Cao, J.D.; Alsaedi, A.; Alsaadi, F.E.; Hayat, T. Global lagrange stability of complex-valued neural networks of neutral type with time-varying delays. Complexity 2016, 21, 438–450. [Google Scholar] [CrossRef]
- Gong, W.Q.; Liang, J.L.; Cao, J.D. Global μ-stability of complex-valued delayed neural networks with leakage delay. Neurocomputing 2015, 168, 135–144. [Google Scholar] [CrossRef]
- Song, Q.K.; Zhao, Z.J.; Liu, Y.R. Stability analysis of complex-valued neural networks with probabilistic time-varying delays. Neurocomputing 2015, 159, 96–104. [Google Scholar] [CrossRef]
- Arena, P.; Fortuna, L.; Re, R.; Xibilia, M.G. Multilayer perceptrons to approximate complex valued functions. Int. J. Neural Syst. 1997, 6, 435–446. [Google Scholar] [CrossRef]
- Rosa, M.L.; Rabinovich, M.I.; Huerta, R.; Abarbanel, H.D.I.; Fortuna, L. Slow regularization through chaotic oscillation transfer in an unidirectional chain of Hindmarsh-Rose models. Phys. Lett. A 2000, 266, 88–93. [Google Scholar] [CrossRef]
- Song, Q.K.; Yan, H.; Zhao, Z.J.; Liu, Y.R. Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects. Neural Netw. 2016, 79, 108–116. [Google Scholar] [CrossRef] [PubMed]
- Song, Q.K.; Shu, H.Q.; Zhao, Z.J.; Liu, Y.R.; Alsaadi, F.E. Lagrange stability analysis for complex-valued neural networks with leakage delay and mixed time-varying delays. Neurocomputing 2017, 244, 33–41. [Google Scholar] [CrossRef]
- Özdemir, N.; İskender, B.B.; Özgür, N.Y. Complex valued neural network with Möbius activation function. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 4698–4703. [Google Scholar] [CrossRef]
- Nitta, T. Complex-Valued Neural Networks: Utilizing High-Dimensional Parameters; IGI Global: Hershey, PA, USA, 2009. [Google Scholar]
- Velmurugan, G.; Rakkiyappan, R.; Vembarasan, V.; Cao, J.D.; Alsaedi, A. Dissipativity and stability analysis of fractional-order complex-valued neural networks with time delay. Neural Netw. 2017, 86, 42–53. [Google Scholar] [CrossRef] [PubMed]
- Aizenberg, I. Complex-Valued Neural Networks with Multi-Valued Neurons; Springer: New York, NY, USA, 2011; pp. 39–62. [Google Scholar]
- Gong, W.Q.; Liang, J.L.; Zhang, C.J. Multistability of complex-valued neural networks with distributed delays. Neural Comput. Appl. 2017, 28, 1–14. [Google Scholar] [CrossRef]
- Zhang, Y.N.; Li, Z.; Li, K.N. Complex-valued neural network for online complex-valued time-varying matrix inversion. Appl. Math. Comput. 2011, 217, 10066–10073. [Google Scholar] [CrossRef]
- Hirose, A. Complex-Valued Neural Networks; Springer: Heidelberg, Germany, 2012; pp. 53–71. [Google Scholar]
- Huang, C.D.; Cao, J.D.; Xiao, M.; Alsaedi, A.; Hayat, T. Bifurcations in a delayed fractional complex-valued neural network. Appl. Math. Comput. 2017, 292, 210–227. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999; pp. 41–117. [Google Scholar]
- Bai, Z.B.; Zhang, S.; Sun, S.J.; Yin, C. Monotone iterative method for fractional differential equations. Electron. J. Differ. Equ. 2016, 2016, 1–8. [Google Scholar]
- Bai, Z.B.; Dong, X.Y.; Yin, C. Existence results for impulsive nonlinear fractional differential equation with mixed boundary conditions. Bound. Value Probl. 2016, 2016, 63. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, X.; Shi, G.D. Analysis of nonlinear dynamics and chaos in a fractional order financial system with time delay. Comput. Math. Appl. 2011, 62, 1531–1539. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.G.; Wang, Q. Stability analysis of fractional-order Hopfield neural networks with discontinuous activation functions. Neurocomputing 2016, 171, 1075–1084. [Google Scholar] [CrossRef]
- Magin, R.L.; Ingo, C. Entropy and information in a fractional order model of anomalous diffusion. IFAC Proc. Vol. 2012, 45, 428–433. [Google Scholar]
- Huang, X.; Fan, Y.J.; Jia, J.; Wang, Z.; Li, Y.X. Quasi-synchronisation of fractional-order memristor-based neural networks with parameter mismatches. IET Control Theory Appl. 2017, 11, 2317–2327. [Google Scholar] [CrossRef]
- Xi, H.L.; Li, Y.X.; Huang, X. Generation and nonlinear dynamical analyses of fractional-order memristor–based Lorenz systems. Entropy 2014, 16, 6240–6253. [Google Scholar]
- Gu, Y.J.; Yu, Y.G.; Wang, H. Synchronization-based parameter estimation of fractional-order neural networks. Physica A 2017, 483, 351–361. [Google Scholar] [CrossRef]
- Ding, X.S.; Cao, J.D.; Zhao, X.; Alsaadi, F.E. Finite-time Stability of Fractional-order Complex-valued Neural Networks with Time Delays. Neural Process. Lett. 2017, 46, 561–580. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.G.; Yu, J.Z. LMI Conditions for global stability of fractional-order neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2423–2433. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.M.; Song, Q.K.; Liu, Y.R.; Zhao, Z.J.; Alsaadi, F.E. Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with both leakage and time-varying delays. Neurocomputing 2017, 245, 86–101. [Google Scholar]
- Jiang, C.M.; Liu, S.T.; Wang, D. Generalized Combination Complex Synchronization for Fractional-Order Chaotic Complex Systems. Entropy 2015, 17, 5199–5217. [Google Scholar] [CrossRef]
- Zhang, L.; Song, Q.K.; Zhao, Z.J. Stability analysis of fractional-order complex-valued neural networks with both leakage and discrete delays. Appl. Math. Comput. 2017, 298, 296–309. [Google Scholar] [CrossRef]
- Huang, X.; Zhao, Z.; Wang, Z.; Li, Y.X. Chaos and hyperchaos in fractional-order cellular neural networks. Neurocomputing 2012, 94, 13–21. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Hu, C.; Jiang, H.; Fan, X. Projective synchronization for fractional neural networks. Neural Netw. 2014, 49, 87–95. [Google Scholar]
- Ma, W.Y.; Li, C.P.; Wu, Y.J.; Wu, Y.Q. Adaptive Synchronization of Fractional Neural Networks with Unknown Parameters and Time Delays. Entropy 2014, 16, 6286–6299. [Google Scholar] [CrossRef]
- Kaslik, E.; Sivasundaram, S. Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw. 2012, 32, 245–256. [Google Scholar] [CrossRef] [PubMed]
- Bao, H.B.; Park, J.H.; Cao, J.D. Synchronization of fractional-order complex-valued neural networks with time delay. Neural Netw. 2016, 81, 16–28. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.P.; Sang, C.Y.; Li, X.; Fang, M.Y.; Wang, Z. H∞ consensus for nonlinear stochastic multi-agent systems with time delay. App. Math. Comput. 2018, 325, 41–58. [Google Scholar] [CrossRef]
- Wang, J.; Liang, K.; Huang, X.; Wang, Z.; Shen, H. Dissipative fault-tolerant control for nonlinear singular perturbed systems with Markov jumping parameters based on slow state feedback. App. Math. Comput. 2018. [Google Scholar] [CrossRef]
- Liang, K.; Dai, M.C.; Shen, H.; Wang, J.; Wang, Z.; Chen, B. L2 − L∞ synchronization for singularly perturbed complex networks with semi-Markov jump topology. Appl. Math. Comput. 2018, 321, 450–462. [Google Scholar] [CrossRef]
- Wang, Z.; Li, L.; Li, Y.X.; Cheng, Z.S. Stability and Hopf bifurcation of a three-neuron network with multiple discrete and distributed delays. Neural Process. Lett. 2018. [Google Scholar] [CrossRef]
- Cui, X.L.; Yu, Y.G.; Wang, H.; Hu, W. Dynamical analysis of memristor-based fractional-order neural networks with time delay. Mod. Phys. Lett. B 2016, 30, 1650271. [Google Scholar] [CrossRef]
- Gu, Y.J.; Yu, Y.G.; Wang, H. Synchronization for fractional-order time-delayed memristor-based neural networks with parameter uncertainty. J. Frankl. Inst. 2016, 353, 3657–3684. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Cao, J.D.; Velmurugan, G. Existence and uniform stability analysis of fractional-order complex-valued neural networks with time delays. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 84–97. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wang, X.H.; Li, Y.X.; Huang, X. Stability and Hopf bifurcation of fractional-order complex-valued single neuron model with time delay. Int. J. Bifurc. Chaos 2017, 27, 1750209. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Velmurugan, G.; Cao, J.D. Stability analysis of fractional-order complex-valued neural networks with time delays. Chaos Solitons Fractals 2015, 78, 297–316. [Google Scholar] [CrossRef]
- Rakkiyappan, R.; Velmurugan, G.; Cao, J.D. Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with time delays. Nonlinear Dyn. 2014, 78, 2823–2836. [Google Scholar] [CrossRef]
- Zhang, H.; Ye, R.Y.; Liu, S.; Cao, J.D.; Alsaedi, A.; Li, X.D. LMI-based approach to stability analysis for fractional-order neural networks with discrete and distributed delays. Int. J. Syst. Sci. 2017, 49, 1–9. [Google Scholar] [CrossRef]
- Liu, D.; Zhu, S.; Ye, E. Synchronization stability of memristor-based complex-valued neural networks with time delays. Neural Netw. 2017, 96, 115–127. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Zhang, W.L.; Yang, X.S.; Xu, C.; Feng, J.W. Finite-time synchronization of complex-valued neural networks with mixed delays and uncertain perturbations. Neural Process. Lett. 2017, 46, 271–291. [Google Scholar] [CrossRef]
- Li, X.F.; Fang, J.A.; Li, H.Y. Master-slave exponential synchronization of delayed complex-valued memristor-based neural networks via impulsive control. Neural Netw. 2017, 93, 165–175. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.P.; Qu, J.F.; Chai, Y.; Wu, R.C.; Qi, G.Y. Synchronization of a Class of Fractional-Order Chaotic Neural Networks. Entropy 2013, 15, 3265–3276. [Google Scholar] [CrossRef]
- Wei, H.Z.; Li, R.X.; Chen, C.R.; Tu, Z.W. Stability analysis of fractional order complex-valued memristive neural networks with time delays. Neural Process. Lett. 2017, 45, 379–399. [Google Scholar] [CrossRef]
- Zhang, W.W.; Cao, J.D.; Chen, D.Y.; Alsaadi, F.E. Synchronization in fractional-order complex-valued delayed neural networks. Entropy 2018, 20, 54. [Google Scholar] [CrossRef]
- Bao, H.B.; Park, J.H.; Cao, J.D. Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 2015, 82, 1343–1354. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.G.; Wang, H. Mittag-Leffler stability of fractional-order Hopfield neural networks. Nonlinear Anal. 2015, 16, 104–121. [Google Scholar] [CrossRef]
Figure 1.
Time evolution of states , , and in 2-D plane.

Figure 2.
Time evolution of , , and in 3-D space.

Figure 3.
Synchronization errors with five different initial values, .

Figure 4.
Synchronization errors and with five different initial values.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 6.
Time response of the feedback gains , , , and .

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, L.; Wang, Z.; Lu, J.; Li, Y. Adaptive Synchronization of Fractional-Order Complex-Valued Neural Networks with Discrete and Distributed Delays. Entropy 2018, 20, 124. https://doi.org/10.3390/e20020124
AMA Style
Li L, Wang Z, Lu J, Li Y. Adaptive Synchronization of Fractional-Order Complex-Valued Neural Networks with Discrete and Distributed Delays. Entropy. 2018; 20(2):124. https://doi.org/10.3390/e20020124
Chicago/Turabian StyleLi, Li, Zhen Wang, Junwei Lu, and Yuxia Li. 2018. "Adaptive Synchronization of Fractional-Order Complex-Valued Neural Networks with Discrete and Distributed Delays" Entropy 20, no. 2: 124. https://doi.org/10.3390/e20020124
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.